
Dirección (automóvil) para niños
La dirección es el sistema que permite a un vehículo cambiar su camino para ir hacia donde el conductor desea. En la mayoría de los casos, esto se logra moviendo las ruedas del vehículo. Por ejemplo, en un automóvil, las ruedas delanteras giran. En una motocicleta, el conductor se inclina para cambiar la dirección. En sillas de ruedas o vehículos de oruga, el cambio de dirección ocurre porque las ruedas de un lado giran a una velocidad diferente que las del otro lado.
Una excepción son los trenes, donde la dirección se controla con los rieles y los cambios de vía. La función principal de cualquier sistema de dirección es permitir que el conductor guíe el vehículo.
En vehículos que cambian la dirección de sus ruedas, el giro ocurre porque al mover el volante o manillar, el conductor cambia el ángulo de las ruedas que dirigen. La fuerza que se crea entre la carretera y el eje de giro hace que el vehículo se mueva.
Contenido
- Historia de la dirección
- Técnica actual de dirección
- Dirección asistida
- 4 ruedas directrices (4RD)
- Galería de imágenes
- Véase también
Historia de la dirección
¿Cómo surgieron las ruedas y los ejes?
La historia de la dirección está muy ligada a la invención de la rueda y cómo se usó para el transporte.

En la naturaleza no existen las ruedas. De hecho, algunas civilizaciones, como las de Mesoamérica, nunca las usaron para el transporte, aunque conocían cómo funcionaban.
Una razón para usar ruedas es que son mucho más eficientes que arrastrar cosas o cargar directamente a los animales. Los animales de tiro disponibles en Eurasia durante la Edad del Bronce (como los onagros o los uros) no eran buenos para montar. Sin embargo, al usar carros, su utilidad aumentaba mucho.
La invención de la rueda fue un proceso lento. Se necesitaba una industria del metal avanzada para poder fabricarlas. Aunque se usaban dispositivos giratorios (como troncos para mover barcos), el camino hacia la invención de la rueda y el eje no fue sencillo. El transporte con ruedas depende de cómo se manejan la fricción y la torsión en los ejes, y de fabricar piezas confiables para unirlas al carro y a las ruedas. Esto requería un buen nivel de desarrollo tecnológico.
Las primeras ruedas que conocemos no se usaron para el transporte, sino para la alfarería. Eran los tornos de alfarero de Mesopotamia, que son como una máquina simple llamada torno. Para que el torno funcionara, la rueda debía girar libremente sobre un eje. Esto significaba que primero tuvieron que resolver los problemas de la fricción y cómo fijar la rueda a la mesa de trabajo. Los primeros ejemplos son del año 3800 antes de Cristo.
Trescientos años después, en Mesopotamia, aparecieron conjuntos de rueda y eje unidos que se usaban para el transporte. Probablemente servían para sostener una "mesa de transporte" atada con correas de cuero. La primera imagen de un carro con ruedas es casi de la misma época. Se encontró en la Olla de Bronocice, en lo que hoy es Polonia. Esto sugiere que la rueda se extendió rápidamente por las estepas europeas. En la cerámica se ve un carro de dos ejes con un tipo primitivo de yugo, que fue el primer sistema de dirección. En el mismo lugar se encontraron restos de uros con cuernos desgastados, lo que indica que se usaron para atar cuerdas al yugo.
A medida que la rueda se extendía por Eurasia, surgieron dos tipos principales de ruedas:
- Las que usaban el conjunto de rueda y eje giratorio mesopotámico, conocidas como ruedas alpinas. En este caso, el carro descansaba directamente sobre los ejes giratorios. Este diseño era más fácil de fabricar y duradero. Se usaba en carros de dos ejes, donde el conductor caminaba junto al animal.
- Las que usaban ejes fijos al carro y ruedas con un "cubo" (un receptáculo en el centro de la rueda donde se alojaba el extremo de un eje que no giraba). Estas ruedas con cubos eran más eficientes, pero más difíciles de fabricar y solo podían transportar cargas más pequeñas. Se usaban en carros "rápidos" de un solo eje, donde el conductor podía ir montado.
-

Reproducción de la rueda de Ljubljana 3150 AC.
-

Rueda con eje solidario rotarorio, (Turquía diseño tradicional)
-

Rueda con cubo y radios de bronce Árokalja, 1000 AC.
-

Carro etrusco de Monteleone, 650 AC
-

Rueda de carro funerario con cubo Hallazgo de Oseberg, 834 DC
.jpg)




Ejes que giran: el pivote central

Para que un vehículo de dos o más ejes pudiera girar, la solución más sencilla fue permitir que el primer eje girara sobre un eje de pivote vertical. Este sistema se usó en carros de dos ejes. Así, los caballos podían tirar del carro desde los lados en las curvas, haciendo que el vehículo girara sobre su último eje.
Vehículos articulados
Otro sistema era dividir el vehículo en dos partes, cada una unida firmemente a un eje. Esto permitía un movimiento similar al de los vehículos con ejes que podían girar.
Ejes que giran con bujes
Los ejes que giran unidos a las ruedas funcionaban bien para dirigir las ruedas delanteras de un carro de dos ejes. Sin embargo, no resolvían el problema de la estabilidad al unir ambas ruedas, forzándolas a girar a la misma velocidad.

En un eje con dos ruedas, la rueda interior recorre una distancia menor en una curva que la rueda exterior. Si ambas ruedas están unidas, ninguna girará a la velocidad correcta para la distancia recorrida. Esto hace que cada rueda arrastre a la otra, lo que puede dañar el eje.
La solución llegó con los "ejes partidos", gracias a un avance técnico: el buje. El buje es una evolución del cubo que permite que cada rueda gire libremente en sus extremos (ruedas "locas" o separadas). Esto hace posible que el eje pueda hacer giros muy cerrados. Las ruedas con bujes (al principio, cojinetes simples con materiales como lana para reducir la fricción) se conocen desde hace mucho tiempo. Pero a diferencia de los ejes unidos, eran elementos de alta tecnología y muy caros. Se usaban casi solo en carros de guerra de dos ruedas. Un ejemplo de este tipo de dirección se ve en las sillas de ruedas, que pueden girar sobre su propio eje haciendo que una rueda principal gire en sentido contrario a la otra.
La combinación de estos dos avances (el eje que gira y las ruedas separadas) mejoró mucho la estabilidad. Esto hizo posible la aparición de vehículos rápidos de dos ejes. Cuando el conductor gira el volante, las dos ruedas delanteras se orientan de forma natural hacia el punto de giro. Esto se debe a que sus bujes están unidos por el eje, formando una línea que, si se extiende hasta el eje trasero, nos da el "centro del radio de giro", que es el punto alrededor del cual gira el vehículo. Este sistema de eje partido se usó incluso en los primeros automóviles, como el Clement-Panhard.
Sin embargo, este sistema no es bueno cuando el ancho del eje es grande. En curvas cerradas, la distancia entre las ruedas delanteras y traseras aumenta mucho en el lado exterior de la curva y disminuye en el interior. Esto afecta la estabilidad y dificulta su uso con un sistema de suspensión. Por eso, los vehículos de tiro "rápidos" como los carros de guerra solían tener un solo eje, y muchos de los primeros vehículos a motor usaban direcciones con una sola rueda.
Geometría de dirección de Ackermann

Para resolver los problemas de las direcciones con un solo eje, surgieron las direcciones de dos semiejes o "cuadriláteros articulados".
Estos sistemas se basan en otro avance técnico: el pivote de dirección. Este pivote, que viene del buje, permite que cada rueda no solo gire de forma independiente, sino que también pueda pivotar sobre su propio eje de pivote. El sistema se llama "cuadrilátero" porque tiene cuatro partes: el eje delantero, una "barra" de dirección detrás de este (generalmente la propia cremallera) y dos "tirantes" o semiejes articulados que unen esta barra con los pivotes de dirección de cada rueda. La geometría de dirección de Ackermann es una forma específica de organizar estas cuatro partes. Fue descrita por primera vez por el constructor alemán "Lankensperger" en 1817 para coches de caballos y patentada por Rudolph Ackermann en 1818. Aunque hubo ideas previas, su forma definitiva apareció con las patentes de Karl Benz (1893) y Edward Butler (1897).
La geometría de Ackermann, tal como la conocemos hoy, fue diseñada para que la rueda interior y la exterior tracen círculos de radios diferentes. El sistema original buscaba mantener las ruedas paralelas, lo cual no funcionó bien. El problema es que, a diferencia de los sistemas con un solo pivote central, donde el eje se mueve con el radio de ambas ruedas, aquí el eje permanece fijo. Esto significa que para que ambos pivotes apunten al centro de giro, cada uno debe hacerlo en un ángulo ligeramente diferente debido al ancho del eje. Si se mantuvieran paralelos, no apuntarían al mismo punto, y el vehículo giraría alrededor de un punto intermedio, lo que haría que cada rueda arrastrara a la otra y afectaría la estabilidad.

La geometría de Ackermann resolvió el problema de alinear cada pivote con el radio de su circunferencia de forma sencilla y efectiva. La solución fue la mejora conocida como trapecio de Jeantaud. Esto permitió dirigir cada rueda de forma coordinada, simplemente alineando los tirantes con el centro del eje trasero en lugar de que fueran paralelos. Así, la rueda interior adoptaba un ángulo más cerrado que la exterior.
Un ejemplo temprano de esta mejora se encuentra en el sistema de dirección diseñado por Onésiphore Pecqueur para L'Obéissante, un vehículo de vapor de Amédée Bollée de 1875. Este vehículo ya tenía suspensión independiente y dirección por cremallera.

Los vehículos actuales rara vez usan una geometría de Ackermann "pura". Es común ajustar los ángulos de las ruedas para mejorar el agarre o reducir el desgaste.
Evolución hacia la suspensión independiente
Sistemas de dirección en suspensiones dependientes


A principios del siglo XX, la geometría de dirección de Ackermann se usaba en casi todos los vehículos. La mayoría de ellos seguían usando ejes rígidos en ambos trenes de ruedas. En este tipo de suspensión delantera, que hoy solo se ve en vehículos industriales y algunos todoterrenos grandes, el movimiento de suspensión de una rueda está conectado al de la otra. Esto significa que la distancia entre sus pivotes de dirección no cambia cuando la suspensión trabaja. Esta característica ayudó a que las direcciones con cuadriláteros articulados se extendieran rápidamente, ya que el pivote de dirección trabajaba en un solo sentido, lo cual era muy importante antes de que aparecieran las rótulas. El sistema incluía:
- Los pivotes de dirección de las ruedas que giran.
- El volante y su eje (o columna de dirección).
- La caja de dirección, que transforma el movimiento de giro del volante en un movimiento hacia adelante y atrás. Al principio, no se usaban cajas de dirección, sino mecanismos simples que empujaban barras conectadas a los pivotes. Después, para multiplicar la fuerza del volante, se usaron mecanismos de tornillo sin fin.
- El brazo Pitman o brazo de mando, que gira hacia adelante o atrás al girar la dirección.
- La barra de acoplamiento, que conecta el brazo de mando con uno de los brazos de dirección.
- Los brazos de dirección o tirantes, conectados a ambos pivotes y unidos entre sí por una segunda barra de acoplamiento, formando la geometría de Ackermann.
Sistemas de dirección en suspensiones independientes
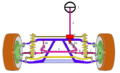
Cuando se hizo evidente la necesidad de una suspensión independiente en el eje delantero, los fabricantes tuvieron que resolver el problema de permitir cambios en el ancho de las ruedas sin afectar la dirección. La solución fue dividir el mecanismo de dirección en dos partes: una unida a la parte suspendida del vehículo (el chasis) y otra a la parte no suspendida (las ruedas), para que pudieran absorber estas diferencias.
Para esto, la barra de acoplamiento no atacaba directamente uno de los pivotes de dirección. En su lugar, se conectaba a una palanca de ataque (ver ilustración) que estaba unida a un punto fijo en el chasis del vehículo. De esta palanca salían las barras articuladas hacia los pivotes de dirección. Este conjunto, conocido como varillaje de dirección, podía absorber el movimiento de la suspensión sin afectar el giro del vehículo.
Esta solución también se usa en vehículos con eje rígido para evitar el "giro inducido", un movimiento no deseado del sistema de dirección causado por los movimientos de la suspensión.
Una excepción notable fue la suspensión Dubonnet. En este sistema, el vástago de la rueda se encuentra en el extremo de una biela que comprime un muelle y un amortiguador dentro de un contenedor horizontal fijado al pivote de dirección. Así, el contenedor y la biela giran con la dirección, y las barras que accionaban los pivotes de dirección los atacaban directamente, sin el complicado varillaje de otros sistemas de la época.
Técnica actual de dirección

Hoy en día, casi todos los coches, vehículos comerciales ligeros y la mayoría de los todoterrenos usan rótulas para conectar las manguetas con los brazos de la suspensión y los tirantes de la dirección. Gracias a que estas uniones permiten "tres grados de libertad", es fácil separar el movimiento vertical de la suspensión del movimiento horizontal de la dirección. Estos sistemas son más compactos y suelen usar una barra de dirección transversal. Incluyen:
- Las manguetas.
- El volante y la columna de dirección, que suele ser articulada.
- La caja de dirección y la barra de dirección en un solo módulo, generalmente una cremallera de dirección. El sistema de tornillo sin fin y barra longitudinal (brazo Pitman) solo se usa en vehículos pesados.
- Los brazos de acoplamiento o tirantes, conectados mediante rótulas a la barra de dirección o cremallera y a las manguetas.
- Las rótulas, que permiten que el movimiento vertical de la suspensión no afecte el movimiento horizontal de la dirección.
Dirección asistida
La dirección asistida es un sistema que ayuda al conductor a girar el volante con menos esfuerzo.
¿Cómo funciona la dirección asistida?
Cuando giras las ruedas para cambiar la dirección del vehículo, aparece una fuerza en el neumático que tiende a enderezar la rueda. Esta fuerza se debe principalmente a la resistencia del neumático a deformarse.
La dirección asistida ayuda al conductor a vencer esta fuerza. Así, la fuerza que aplica el conductor más la ayuda de la dirección asistida son iguales a la fuerza que tiende a enderezar la rueda.
La fuerza que tiende a enderezar la rueda depende del vehículo y de la velocidad. A menor velocidad, mayor es la resistencia. Una ventaja de las direcciones electro-hidráulicas o eléctricas es que, al estar controladas electrónicamente, pueden dar una ayuda variable según la velocidad. Esto hace que conducir sea más cómodo.
A bajas velocidades, se necesita más fuerza para girar las ruedas. Si la dirección asistida ayuda más, el conductor tiene que hacer menos esfuerzo. Por el contrario, a velocidades altas, donde se necesita poca fuerza, la dirección asistida apenas ayuda al conductor. En este caso, si la dirección asistida hiciera la mayor parte del esfuerzo, el conductor sentiría que tiene poco control.
El nivel de ayuda que da la dirección asistida es algo que el fabricante decide. Una ayuda baja requiere más esfuerzo del conductor, lo que puede ser más cansado. Una ayuda alta requiere menos esfuerzo, pero la dirección es más sensible a los movimientos del conductor. A veces se dice que las direcciones eléctricas "transmiten poca información" o "no tienen tacto".
Otra ventaja del control electrónico es que se puede variar el nivel de ayuda no solo por la velocidad, sino también por la situación. Por ejemplo, puede haber programas diferentes para conducir en ciudad o en carretera. Algunos modelos de Fiat Group Automobiles tienen una opción llamada Dualdrive que permite esto. Además, puede ayudar al conductor a volver a la posición central.
Tipos de dirección asistida
Según el tipo de energía que usan para ayudar, las direcciones asistidas se clasifican en cuatro grupos:
- Vacío
- Hidráulica
- Electro-hidráulica
- Eléctrica
Dirección hidráulica
Las direcciones hidráulicas fueron los primeros sistemas de dirección asistida que se usaron, y superaron a las de vacío. Tradicionalmente, eran el sistema común en todo tipo de vehículos, aunque ahora están siendo reemplazadas por las electro-hidráulicas y eléctricas. Hoy en día, casi no se instalan en modelos nuevos.
La dirección hidráulica usa energía hidráulica para ayudar, mediante una bomba conectada al motor. Su funcionamiento puede variar, pero generalmente combina la cremallera con un cilindro hidráulico de doble efecto. Cuando el conductor gira el volante, una válvula de control permite que el fluido pase a un lado del cilindro, aumentando la presión y empujando la cremallera hacia el lado al que el conductor gira. Cuando el conductor deja de girar, la presión se iguala y el pistón deja de empujar.
Las direcciones hidráulicas usan el giro del motor para impulsar una bomba que proporciona presión hidráulica a un circuito cerrado. En la mayoría de los sistemas, un limitador de presión mantiene la presión constante.
En la mayoría de los sistemas, la columna de dirección no está conectada directamente a la cremallera. Entre ellas hay una válvula de control con una varilla que se tuerce o un sistema de muelles. Cuando el volante está en reposo, esta válvula conecta los circuitos de presión y retorno, así que no llega aceite al cilindro. Al girar el volante, la varilla se tuerce o los muelles se comprimen, permitiendo que el aceite llene una de las cámaras del cilindro, empujando el pistón. El sistema está diseñado para que el pistón haga aproximadamente el 80% de la fuerza necesaria para girar, y el conductor aplica el 20% restante.
El sistema Diravi de Citroën era diferente. No tenía conexión mecánica entre la columna de dirección y la cremallera. Estaba diseñado para que la válvula de control hiciera que la cámara contraria ejerciera suficiente presión para centrar el volante automáticamente, dando una sensación de dirección muy particular de la marca.
Dirección electro-hidráulica
La dirección electro-hidráulica o EHPS es una mejora de la dirección hidráulica. En lugar de usar una bomba hidráulica conectada al motor, usa un motor eléctrico para mover la bomba hidráulica.
Su principal ventaja es que, al no estar conectada al motor del vehículo, evita problemas mecánicos de la transmisión por correa. Además, reduce el consumo de combustible. En este caso, la bomba hidráulica solo funciona cuando se necesita y al ritmo necesario para la dirección. El motor que mueve la bomba se alimenta de la batería.
Estas ventajas han hecho que las direcciones electro-hidráulicas reemplacen gradualmente a las hidráulicas.
El funcionamiento de una dirección electro-hidráulica es similar al de una hidráulica.
Dirección eléctrica
Las direcciones eléctricas o EPS son el tipo más reciente de dirección asistida. Usan un motor eléctrico para ayudar a la dirección.
Su ventaja sobre las hidráulicas y electro-hidráulicas es que, al no usar energía hidráulica, son más ligeras y simples, ya que eliminan la instalación y la bomba hidráulica.
Según dónde se aplica la ayuda, las direcciones eléctricas se dividen en:
- Column drive: la ayuda se aplica en la columna de dirección.
- Pinion drive: la ayuda se aplica en el piñón de la dirección.
- Rack drive: la ayuda se aplica en la cremallera de la dirección.
4 ruedas directrices (4RD)

Para mejorar el control de un vehículo de cuatro ruedas, es útil un sistema de dirección en las cuatro ruedas. Incluso existen sistemas con dirección y tracción en todas las ruedas, como los tractores militares de la Primera Guerra Mundial.
Las cuatro ruedas pueden girar en direcciones opuestas en la misma curva (reduciendo el radio de giro del vehículo) o en la misma dirección (mejorando la maniobrabilidad de algunos vehículos agrícolas y de mantenimiento, permitiendo incluso movimientos laterales o "en cangrejo"). Por eso, se usa desde hace mucho tiempo en vehículos industriales.
Automóviles de pasajeros con 4RD

En automóviles de pasajeros, el primer uso en serie fue en 1987, cuando Honda lanzó un sistema de este tipo en su Honda Prelude. Esto hizo que otros fabricantes consideraran esta innovación. Una de las ventajas más prometedoras era la mejora del comportamiento a alta velocidad, ya que una dirección en ambos ejes permite un movimiento lateral más suave. Algunos fabricantes como Mazda, Toyota o Mitsubishi ofrecieron sistemas hidráulicos opcionales, mientras que Honda se mantuvo fiel a un sistema totalmente mecánico que se adaptaba a la velocidad. El éxito no fue el esperado porque el comportamiento del vehículo se consideró "extraño" a pesar de sus cualidades.
En 1991, Honda introdujo el control electrónico en el nuevo Honda Prelude. Esta vez, el sistema (basado en el ángulo y la velocidad de giro del volante) era totalmente electrónico, logrando una sensación de conducción más clara. Se usó en generaciones posteriores del modelo Prelude hasta que dejó de fabricarse en 2001.
Otros fabricantes usan variantes del sistema electrónico en vehículos de gama alta y algunos 4x4. En 2008, Renault desarrolló un sistema de dirección activa para el Renault Laguna III que trabajaba con el ESP, llamado "Active Drive" y luego "4Control". Este sistema permitía, mediante un ordenador electrónico y un motor, girar las ruedas traseras hasta 3.5 grados a velocidades de hasta 60 km/h. A partir de esa velocidad, las ruedas traseras comenzaban a girar en el mismo sentido que las delanteras. BMW introdujo su propio sistema en el BMW Serie 7 de 2009, combinado con la tracción total.
En el mundo de la competición, su uso es muy limitado. Aunque algunos pilotos de rally lo consideran muy eficaz, no está permitido en la Fórmula 1.
Actualmente, se usan más comúnmente sistemas de dirección pasiva que ajustan los ángulos de las ruedas traseras mediante la forma de las suspensiones multibrazo.
Galería de imágenes
-

Detalle del mecanismo de dirección de un Ford T de 1925
-
Esquema de un sistema de dirección tipo Ackerman. (1:Volante; 2: Columna de dirección; 3: Engranaje de la dirección; 4A: Brazo de mando; 4B: Brazo tensor; 5: Tirante central; 6: Tirante interno; 7: Mangueta de ajuste; 8: Brazos de los tirantes)


Véase también
 En inglés: Steering Facts for Kids
En inglés: Steering Facts for Kids
- Rótula (mecánica)
- Suspensión (automóvil)
- Dualdrive
- Husillo de bolas
