
Movimiento (física) para niños
En física, el movimiento es el cambio de posición de un objeto a lo largo del tiempo. Este cambio se mide siempre en relación con un punto o lugar que tomamos como referencia.
Podemos estudiar el movimiento de dos maneras principales:
- La cinemática se encarga de describir cómo se mueven los objetos, sin preocuparse por qué los hace mover.
- La dinámica estudia las causas que provocan o cambian el movimiento de los objetos.
Cuando elegimos un punto de referencia, podemos usar ecuaciones para saber dónde estará un objeto, qué tan rápido se mueve (su velocidad) y cómo cambia su velocidad (su aceleración) en cualquier momento. También podemos usar gráficas para entender el movimiento, mostrando cómo cambian la posición, la velocidad o la aceleración con el tiempo.
La velocidad y la aceleración siempre dependen del punto de referencia que elijamos.


Contenido
¿Qué es el movimiento en física?
Un objeto o sistema físico tiene varias características importantes:
- Tiene una posición en el espacio y el tiempo.
- Su estado físico puede cambiar con el tiempo.
- Se le puede asociar una cantidad llamada energía.
El movimiento se refiere a cómo cambia una propiedad de un objeto en el espacio a lo largo del tiempo. Por ejemplo, puede cambiar su ubicación, su forma o su tamaño. Un observador es quien mide estos cambios.
Cinemática: Describiendo el movimiento
La cinemática se enfoca en describir el movimiento de los objetos. Imagina que solo te importa saber por dónde va un coche y a qué velocidad, sin preguntar por qué se mueve. Esta parte de la física describe la trayectoria (el camino que sigue) y el desplazamiento (cuánto se mueve de un lugar a otro) de un objeto a medida que pasa el tiempo.
Dinámica: Las causas del movimiento
La dinámica va más allá y estudia las razones por las que un objeto se mueve o cambia su movimiento. Aquí se consideran conceptos como la fuerza, la inercia (la resistencia de un objeto a cambiar su estado de movimiento) y la energía mecánica.
Mecánica: El estudio completo del movimiento
La mecánica es la rama de la física que une la cinemática y la dinámica. Estudia tanto el movimiento como el reposo de los objetos. Es una de las bases de la ingeniería y ha sido fundamental para entender cómo funciona el mundo.
En el siglo XX, con el estudio de objetos muy pequeños (partículas subatómicas) o muy rápidos (cercanos a la velocidad de la luz), surgieron nuevas teorías como la mecánica relativista y la mecánica cuántica. Estas teorías describen el movimiento de una manera más compleja y abstracta que la mecánica clásica.
Características del movimiento
Para entender el movimiento, usamos algunos conceptos clave:
¿Qué es un móvil?
En física, llamamos móvil al objeto cuyo movimiento queremos estudiar. Dependiendo de cómo sea el objeto, podemos verlo de diferentes maneras:
- Móvil puntual: Es como si el objeto fuera un punto muy pequeño. Solo nos importa cómo cambia su ubicación. A esto se le llama movimiento de traslación.
- Móvil sólido rígido: Es un objeto que no se deforma, como una pelota de baloncesto. Su movimiento puede ser una combinación de:
* Traslación: Cuando todo el objeto se mueve de un lugar a otro. * Rotación: Cuando el objeto gira alrededor de un punto o una línea (llamada eje de rotación), como una peonza.

- Móvil sólido deformable: Es un objeto que puede cambiar su forma o tamaño, como una esponja. Su movimiento incluye traslación, rotación y también deformación. Si la deformación es temporal (vuelve a su forma original), se llama elástica. Si es permanente, se llama plástica. Las vibraciones son un tipo de movimiento elástico repetitivo.
- Fluido: Es un líquido o un gas. No tienen una forma definida y se deforman fácilmente. Su movimiento se describe como un flujo.
Instante y duración: El tiempo en el movimiento
El tiempo nos ayuda a medir cuánto dura algo o a ordenar los eventos. Para describir el movimiento, podemos hablar de una duración (un periodo de tiempo) o un instante (un momento muy, muy corto).
Posición y desplazamiento: ¿Dónde está y cuánto se mueve?
La posición de un objeto nos dice dónde está en un momento dado. Usamos sistemas de coordenadas (como un mapa con ejes X, Y, Z) para ubicarlo.
El desplazamiento es un vector que nos indica el cambio de posición de un objeto. Va desde el punto de inicio hasta el punto final, sin importar el camino que haya tomado.

Trayectoria: El camino que sigue
La trayectoria es el camino que un objeto sigue mientras se mueve. Es como el rastro que deja. La forma de la trayectoria depende del punto de vista del observador.
- En un movimiento de traslación, la trayectoria es una línea o curva en el espacio.
- En una rotación, la trayectoria se describe por los ángulos de giro.
- En fluidos, hablamos de tipos de flujo:
* Flujo laminar: El fluido se mueve de forma ordenada, en capas paralelas. * Flujo turbulento: El fluido se mueve de forma caótica, con pequeños remolinos.
Velocidad: ¿Qué tan rápido y en qué dirección?
La velocidad es una medida de qué tan rápido se mueve un objeto y en qué dirección. Es una magnitud vectorial, lo que significa que tiene una magnitud (la rapidez) y una dirección.
- La rapidez (o celeridad) solo nos dice qué tan rápido se mueve algo, como "60 km/h".
- La velocidad nos dice la rapidez y la dirección, como "60 km/h hacia el norte".

En movimientos de rotación, usamos la velocidad angular, que mide qué tan rápido gira un objeto. Se mide en radianes por segundo (rad/s).
Aceleración: ¿Cómo cambia la velocidad?
La aceleración es una magnitud vectorial que mide cómo cambia la velocidad de un objeto con el tiempo. Puede ser un aumento o una disminución de la rapidez, o un cambio en la dirección del movimiento.
- Si un coche frena, está experimentando una aceleración negativa (a veces llamada desaceleración).
- Si un coche toma una curva a velocidad constante, su rapidez no cambia, pero su dirección sí, por lo tanto, está acelerando.

En movimientos de rotación, usamos la aceleración angular, que mide cómo cambia la velocidad angular.
Características dinámicas del movimiento
Además de cómo se mueven los objetos, la dinámica estudia por qué se mueven. Aquí entran en juego conceptos como:
Inercia: La resistencia al cambio
La inercia es la propiedad de los objetos de resistirse a cambiar su estado de movimiento. Un objeto en reposo tiende a quedarse en reposo, y un objeto en movimiento tiende a seguir moviéndose en línea recta y a velocidad constante, a menos que una fuerza actúe sobre él.
- Para movimientos de traslación, la masa es la medida de la inercia. Cuanta más masa, más difícil es cambiar su movimiento.
- Para movimientos de rotación, el momento de inercia mide la resistencia de un objeto a girar o a cambiar su giro. Depende de cómo está distribuida la masa alrededor del eje de giro.
.gif)
Cantidad de movimiento (momentum): Cuánto movimiento tiene un objeto
La cantidad de movimiento (también llamada momento lineal o ímpetu) es una magnitud vectorial que describe el movimiento de un objeto. Se calcula multiplicando la masa del objeto por su velocidad.
Imagina una mosca y un camión moviéndose a la misma velocidad. El camión tiene mucha más masa, por lo tanto, tiene mucha más cantidad de movimiento y es mucho más difícil de detener.
- Un objeto en reposo mecánico tiene una cantidad de movimiento igual a cero.
- Un movimiento uniforme es aquel donde la cantidad de movimiento se mantiene constante.
Fuerza: Lo que causa el cambio
En física, la fuerza es lo que puede cambiar la cantidad de movimiento o la forma de los objetos. Se mide en Newtons (N).
- Si varias fuerzas actúan sobre un objeto, se suman para dar una fuerza resultante.
- Si la fuerza resultante es cero, el objeto estará en reposo o se moverá en línea recta a velocidad constante (esto es la primera ley de Newton).
- Si la fuerza resultante no es cero, el objeto acelerará. La fuerza es igual a la masa por la aceleración (esto es la segunda ley de Newton, F = m * a).
- La tercera ley de Newton dice que por cada acción, hay una reacción igual y opuesta. Si empujas una pared, la pared te empuja a ti con la misma fuerza.

En movimientos de rotación, el equivalente a la fuerza es el momento de una fuerza o torque, que causa que un objeto gire o cambie su giro.
Energía: La capacidad de hacer cambios
La energía es la capacidad de un sistema físico para realizar una transformación, como mover un objeto, deformarlo o calentarlo. Se mide en julios (J).
- La energía cinética es la energía que tiene un objeto debido a su movimiento. Cuanto más rápido se mueve un objeto y más masa tiene, mayor es su energía cinética. Un objeto en reposo tiene energía cinética cero.
- El trabajo es la energía transferida cuando una fuerza mueve un objeto a lo largo de una distancia. Si empujas una caja y la mueves, estás realizando trabajo. Si la fuerza es perpendicular al movimiento o no hay movimiento, no se realiza trabajo.

En los fluidos, el principio de Bernoulli explica que la energía total de un fluido en movimiento tiene tres partes: energía por su velocidad (cinética), energía por su altura (potencial) y energía por su presión.
Historia del estudio del movimiento
Las preguntas sobre el movimiento han existido por miles de años. Las respuestas que usamos hoy se desarrollaron principalmente gracias a científicos como Galileo Galilei e Isaac Newton.
Ideas antiguas sobre el movimiento
- Filósofos como Demócrito pensaban que la naturaleza estaba hecha de partículas indivisibles (átomos) y que el movimiento era su característica principal.
- Aristóteles creía que los objetos más pesados caían más rápido que los ligeros. Esta idea fue aceptada por casi 2000 años.
Galileo y Newton: La mecánica clásica
Galileo Galilei fue uno de los primeros en estudiar el movimiento de forma experimental. Subió a la Torre de Pisa y soltó objetos de diferente peso, demostrando que caían a la misma velocidad, refutando la idea de Aristóteles. Galileo también formuló el principio de la inercia: un objeto en reposo o en movimiento rectilíneo uniforme seguirá así a menos que una fuerza actúe sobre él.
Isaac Newton construyó sobre las ideas de Galileo y formuló sus famosas tres leyes del movimiento, que son la base de la mecánica clásica:
- Primera Ley (Ley de la Inercia): Un objeto permanece en reposo o en movimiento rectilíneo uniforme a menos que una fuerza externa lo cambie.
- Segunda Ley (Ley Fundamental de la Dinámica): La fuerza aplicada a un objeto es igual a su masa multiplicada por su aceleración (F = m * a). Esto explica cómo una fuerza cambia el movimiento.
- Tercera Ley (Ley de Acción y Reacción): Por cada acción, hay una reacción igual y opuesta. Las fuerzas siempre vienen en pares.
Estas leyes revolucionaron la física y nos permitieron entender y predecir el movimiento de los objetos en el universo.
Tipos de movimientos de traslación
Un movimiento de traslación es cuando un objeto cambia su posición de un lugar a otro.
Movimientos rectilíneos
Un movimiento es rectilíneo cuando el objeto se mueve en línea recta.
- Movimiento Rectilíneo Uniforme (MRU): El objeto se mueve en línea recta a una velocidad constante. Su aceleración es cero.
- Movimiento Rectilíneo Uniformemente Acelerado (MRUA): El objeto se mueve en línea recta, pero su velocidad cambia de forma constante (tiene una aceleración constante). Un ejemplo es la caída libre de un objeto.
- Movimiento Armónico Simple (MAS): Es un movimiento de vaivén, como el de un péndulo. El objeto oscila de un lado a otro alrededor de un punto de equilibrio. Su velocidad y aceleración cambian periódicamente.

Movimientos curvilíneos
Un movimiento es curvilíneo cuando el objeto se mueve siguiendo una trayectoria curva.
- Movimiento Circular: El objeto se mueve en un círculo. Si la velocidad de giro es constante, se llama movimiento circular uniforme (MCU). Aunque la rapidez sea constante, la dirección de la velocidad cambia, por lo que hay una aceleración llamada centrípeta, que apunta hacia el centro del círculo.

- Movimiento Pendular: Es el movimiento de un péndulo, que oscila de un lado a otro.
- Movimiento Parabólico: Es el movimiento que describe un objeto lanzado al aire, como una pelota de baloncesto. Su trayectoria forma una parábola. Se puede ver como una combinación de un movimiento horizontal a velocidad constante y un movimiento vertical con aceleración constante (debido a la gravedad).

- Movimiento Ondulatorio: Es un movimiento que se propaga en forma de onda, como las olas en el agua o el sonido. La energía se transmite, pero no hay un flujo neto de masa.

Movimientos rotatorios
Los movimientos rotatorios son aquellos en los que un objeto gira alrededor de un eje. Para describir la rotación de un objeto rígido, necesitamos saber cómo está distribuida su masa alrededor del eje de giro. Esto se describe con el tensor de inercia.
Un ejemplo de movimiento rotatorio complejo es el de un giróscopo o una peonza, que además de girar sobre sí misma, puede tener movimientos de precesión (el eje de giro se mueve en círculo) y nutación (pequeñas oscilaciones del eje).

Movimiento molecular
La dinámica molecular es una técnica de simulación por computadora que permite ver cómo interactúan y se mueven los átomos y las moléculas a lo largo del tiempo. Es como un "microscopio virtual" que nos permite observar el movimiento de partículas muy pequeñas.
Sabemos que la materia está hecha de partículas en constante movimiento. La dinámica molecular nos ayuda a entender cómo este movimiento influye en las propiedades de los materiales y en el funcionamiento de sistemas biológicos como las proteínas.
Un ejemplo de movimiento molecular es el movimiento browniano, que es el movimiento aleatorio de partículas pequeñas en un fluido (líquido o gas) debido a los choques con las moléculas del fluido. Fue observado por primera vez por Robert Brown y explicado por Albert Einstein.

Registro del movimiento
Hoy en día, la tecnología nos permite registrar el movimiento de muchas maneras:
- Los radares de tráfico miden la velocidad de los vehículos usando el efecto Doppler.
- Los taquímetros en los coches miden la velocidad basándose en la rotación de las ruedas.
- Los podómetros cuentan los pasos y estiman la distancia recorrida.
- El vídeo y el análisis informático permiten determinar la posición y velocidad de objetos.
Galería de imágenes
-

La Mecánica comprende el estudio de las máquinas (Polea simple fija).
-
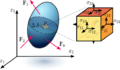
Componentes del tensor tensión en un punto P de un sólido deformable.
-

Esquema del efecto Venturi.
-
La subnormal polar de una espiral de Arquímedes es constante.
-
Animación de una hélice.
-
Cicloide generada por una circunferencia rodando sobre una recta.
-
Comparación entre una trayectoria braquistócrona, y otras dos trayectorias posibles.
-
Hipotrocoide (en trazo rojo), circunferencia directriz (en trazo azul), circunferencia generatriz (en trazo negro). Parámetros: R = 5, r = 3, d = 5).
-
La curva roja es una epicicloide trazada a medida que el pequeño círculo (radio r = 1) gira sobre la circunferencia de un círculo mayor (radio R = 3).
-
Tractrix por arrastre de un poste..
-
Ejemplo de una simulación de un sistema simple por el método de dinámica molecular: deposición de un Átomo de Cu en una superficie de Cu (001). Cada círculo ilustra la posición de un átomo; note que las verdaderas interacciones atómicas usadas en simulación son más complejas que las bidimensionales mostradas en la figura.










Véase también
 En inglés: Motion Facts for Kids
En inglés: Motion Facts for Kids
