
Cinemática para niños
La cinemática es una parte de la física que estudia cómo se mueven los objetos. Imagina que ves un coche en movimiento: la cinemática describe su trayectoria (el camino que sigue), su velocidad (qué tan rápido va) y su aceleración (si su velocidad cambia). Lo importante es que la cinemática describe el movimiento sin preocuparse de por qué se mueve el objeto, es decir, sin hablar de las fuerzas que lo causan.
Para entender el movimiento, la cinemática usa conceptos como:
- Posición: Dónde está el objeto en un momento dado.
- Velocidad: Qué tan rápido se mueve y en qué dirección. Se calcula dividiendo la distancia recorrida entre el tiempo que tardó.
- Aceleración: Qué tan rápido cambia la velocidad del objeto. Se calcula dividiendo el cambio de velocidad entre el tiempo que tardó en cambiar.

Contenido
Historia de la Cinemática
Primeros estudios del movimiento
Desde la Antigua Grecia, filósofos y pensadores ya se interesaban por el movimiento. Sin embargo, los estudios más importantes para la cinemática moderna comenzaron mucho después.
Hacia el año 1605, el famoso científico Galileo Galilei realizó experimentos clave. Estudió cómo caen los objetos (la caída libre) y cómo se mueven las esferas en planos inclinados. Sus descubrimientos ayudaron a entender mejor el movimiento de los planetas y de objetos como las balas de cañón.
Más tarde, científicos como Nicolás Copérnico, Tycho Brahe y Johannes Kepler hicieron grandes avances en el siglo XVI al describir el movimiento de los planetas.
Las leyes de Newton y la cinemática moderna
En 1687, Isaac Newton publicó su obra Principia, que fue un paso gigante en el estudio del movimiento. Newton formuló las tres leyes del movimiento que llevan su nombre, que son fundamentales para entender cómo y por qué se mueven los objetos. También propuso la ley de gravitación universal, que explica cómo los objetos se atraen entre sí.
El nacimiento de la cinemática como una ciencia separada ocurrió en 1700, cuando Pierre Varignon definió la idea de aceleración y mostró cómo calcularla a partir de la velocidad.
En el siglo XVIII, otros científicos como Jean Le Rond d'Alembert, Leonhard Euler y André-Marie Ampère hicieron más contribuciones importantes.
Origen del término "Cinemática"
La palabra "cinemática" fue creada por André-Marie Ampère. Él fue quien definió claramente qué estudia esta rama de la física y cómo se relaciona con otras áreas de la mecánica.
La cinemática en la era moderna
En 1905, Albert Einstein presentó su teoría de la relatividad especial. Esta teoría cambió la forma en que entendemos el espacio y el tiempo, mostrando que no son absolutos, sino que pueden variar dependiendo de la velocidad del observador. Sin embargo, la velocidad de la luz sí es siempre la misma para todos los observadores. Esto dio origen a la cinemática relativista.
Elementos básicos de la cinemática
Para estudiar el movimiento, la cinemática necesita tres elementos principales:
- Espacio: Es el lugar donde ocurre el movimiento. En la física clásica, se considera un espacio infinito y uniforme.
- Tiempo: Es la duración del movimiento. En la física clásica, se considera que el tiempo fluye de la misma manera para todos.
- Móvil: Es el objeto que se mueve. Puede ser un punto muy pequeño (una partícula) o un objeto grande y sólido (un cuerpo rígido).
Cuando se estudia el movimiento de una partícula, se llama Cinemática de la partícula. Si se estudia el movimiento de un cuerpo rígido, se llama cinemática del sólido rígido.
¿Qué estudia la cinemática clásica?
La cinemática clásica se enfoca en describir el movimiento de los cuerpos, como su trayectoria y cómo cambian de orientación. No se pregunta por qué se mueven, solo cómo lo hacen.
Para describir el movimiento, se usan las coordenadas de posición del objeto, que cambian con el tiempo. La forma en que el objeto se mueve (su trayectoria) depende de su velocidad y su aceleración.
El movimiento de un objeto se puede describir según su velocidad y aceleración:
- Si la aceleración es cero, el objeto se mueve en línea recta a una velocidad constante. Esto se llama movimiento rectilíneo uniforme.
- Si la aceleración es constante y en la misma dirección que la velocidad, el objeto se mueve en línea recta y su velocidad cambia de forma constante. Esto se llama movimiento rectilíneo uniformemente acelerado.
- Si la aceleración es constante y perpendicular a la velocidad, el objeto se mueve en un círculo a una velocidad constante. Esto se llama movimiento circular uniforme.
- Si la aceleración es constante y está en el mismo plano que la velocidad, el objeto sigue una trayectoria parabólica, como la de una pelota lanzada.
- En el movimiento armónico simple, el objeto se mueve de un lado a otro de forma repetitiva, como un péndulo. Su velocidad y aceleración cambian de forma regular.
Tipos de movimientos
Movimiento rectilíneo
Es el movimiento en el que un objeto se desplaza en línea recta.
Movimiento rectilíneo uniforme (MRU)

En este tipo de movimiento, el objeto se mueve en línea recta y su velocidad es siempre la misma. Esto significa que no hay aceleración. Un ejemplo es un objeto que se desliza sin fricción o un objeto en el espacio lejos de cualquier fuerza.
La posición del objeto cambia de forma constante con el tiempo. Si el objeto empieza en la posición 0 en el tiempo 0, su posición en cualquier momento se calcula con la fórmula:
- Posición = Velocidad × Tiempo
Movimiento rectilíneo uniformemente variado (MRUV)

Aquí, la aceleración del objeto es constante. Esto significa que su velocidad cambia de forma constante, y su posición cambia de forma más compleja con el tiempo.
Las fórmulas principales son:
- Velocidad final = Velocidad inicial + Aceleración × Tiempo
- Posición final = Posición inicial + (Velocidad inicial × Tiempo) + (1/2 × Aceleración × Tiempo²)
Dos ejemplos importantes de MRUV son:
- Caída libre: Cuando un objeto cae hacia la Tierra solo por la gravedad. Su aceleración es la de la gravedad (aproximadamente 9,8 metros por segundo al cuadrado en la Tierra).
- Tiro vertical: Cuando lanzas un objeto hacia arriba. La gravedad hace que pierda velocidad hasta que se detiene por un instante y luego comienza a caer.
Movimiento armónico simple

Este es un movimiento que se repite una y otra vez, como el de un péndulo o una masa unida a un muelle. El objeto se mueve de un lado a otro alrededor de un punto de equilibrio.
La posición del objeto en este movimiento se describe con funciones matemáticas que se repiten, como las funciones seno o coseno. La aceleración en este movimiento siempre apunta hacia el punto de equilibrio y es más grande cuanto más lejos está el objeto de ese punto.

Movimiento parabólico


 desde un punto
desde un punto  que sigue una trayectoria parabólica.
que sigue una trayectoria parabólica.Este movimiento ocurre cuando un objeto es lanzado y sigue una trayectoria con forma de parábola, como una pelota de baloncesto al ser lanzada. Se puede entender como la combinación de dos movimientos:
- Un movimiento horizontal con velocidad constante (MRU).
- Un movimiento vertical con aceleración constante debido a la gravedad (MRUV).
La velocidad horizontal del objeto no cambia, pero su velocidad vertical sí lo hace debido a la gravedad.
Movimiento circular
Este movimiento ocurre cuando un objeto se mueve en un círculo. Piensa en las aspas de un ventilador o en una noria. Para describir este movimiento, es útil hablar de ángulos y de la velocidad con la que el objeto gira.
- Velocidad angular (ω): Indica qué tan rápido gira el objeto.
- Aceleración angular (α): Indica qué tan rápido cambia la velocidad de giro.
- Velocidad (v): Es la velocidad lineal del objeto, que es tangente al círculo. Su dirección cambia constantemente.
- Aceleración (a): Tiene dos partes: una que cambia la rapidez (aceleración tangencial) y otra que cambia la dirección (aceleración normal o centrípeta), que siempre apunta hacia el centro del círculo.
Movimiento circular uniforme

En este movimiento, el objeto se mueve en un círculo a una velocidad constante. Esto significa que su velocidad angular es constante y no hay aceleración angular. La velocidad lineal del objeto no cambia de rapidez, pero sí de dirección. La aceleración tangencial es cero, pero siempre hay una aceleración centrípeta que lo mantiene en el círculo.
Movimiento circular uniformemente acelerado
Aquí, la velocidad angular del objeto cambia de forma constante porque hay una aceleración angular constante. Las fórmulas son similares a las del movimiento rectilíneo uniformemente acelerado, pero usando ángulos en lugar de distancias.
Movimiento de sólido rígido
Los movimientos anteriores se refieren a objetos pequeños o "puntos". Pero los objetos grandes, como un coche o un robot, no son solo un punto. La cinemática del sólido rígido estudia cómo se mueven estos objetos grandes, considerando no solo su desplazamiento, sino también cómo giran y cambian de orientación.
Movimiento sobre la Tierra
Cuando observamos el movimiento de objetos sobre la Tierra, como masas de aire o proyectiles, a veces vemos desviaciones inesperadas. Esto se debe al Efecto Coriolis, que es una consecuencia de que la Tierra está girando.
Por ejemplo, si lanzas un proyectil hacia el norte desde el ecuador, un observador más al norte verá que el proyectil se desvía hacia el este. Esto ocurre porque el proyectil, al salir del cañón, ya tiene una velocidad hacia el este debido a la rotación de la Tierra. A medida que viaja hacia el norte, se mueve a una parte de la Tierra que gira más lento, por lo que el proyectil parece ir más rápido hacia el este que el suelo debajo de él.
Otro ejemplo es el péndulo de Foucault. El plano en el que oscila este péndulo parece girar lentamente a lo largo del día. Esto también se debe a la rotación de la Tierra.
Cinemática relativista
En la teoría de la relatividad especial de Albert Einstein, la velocidad de la luz en el vacío es una constante universal. Esto significa que, no importa qué tan rápido te muevas, siempre medirás la misma velocidad para la luz. Esto es diferente de la física clásica, donde las velocidades se suman o restan.
Debido a esto, en la relatividad, el espacio y el tiempo no son absolutos, sino que pueden cambiar para diferentes observadores. Por ejemplo, el tiempo puede pasar más lento para un objeto que se mueve muy rápido (esto se llama dilatación temporal). Esto ha sido confirmado por muchos experimentos.
Galería de imágenes
-
Representación de la posición en 3D.
-
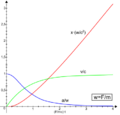
Movimiento relativista bajo fuerza constante: aceleración (azul), velocidad (verde) y desplazamiento (rojo).


Véase también
 En inglés: Kinematics Facts for Kids
En inglés: Kinematics Facts for Kids
- Dinámica
- Mecánica
- Teoría de la relatividad especial
- Cinemática del sólido rígido
