
Aceleración para niños
En física, la aceleración es una medida de cómo cambia la velocidad de un objeto con el tiempo. Imagina que vas en bicicleta: si pedaleas más rápido, estás acelerando. Si frenas, también estás acelerando, pero en sentido contrario. La aceleración nos dice qué tan rápido cambia la velocidad y en qué dirección.
La aceleración es una cantidad que tiene tanto un valor (cuánto acelera) como una dirección (hacia dónde acelera). Se mide en metros por segundo al cuadrado (m/s²).
Por ejemplo, cuando un vehículo empieza a moverse desde cero y aumenta su velocidad en línea recta, está acelerando en la dirección en que avanza. Si el vehículo gira, también hay una aceleración que cambia su dirección de movimiento. Si el vehículo disminuye su velocidad, esto es una aceleración en la dirección opuesta, a veces llamada "desaceleración" o "frenado". Los pasajeros sienten estas aceleraciones: al acelerar, se sienten empujados hacia atrás; al frenar, se sienten empujados hacia adelante; y al girar, se sienten empujados hacia un lado.
Contenido
¿Qué es la Aceleración en Física?
La aceleración es un concepto fundamental en la física que describe cómo la velocidad de un objeto cambia a lo largo del tiempo. Este cambio puede ser en la rapidez (ir más rápido o más lento) o en la dirección del movimiento.
¿Cómo se Relaciona la Aceleración con la Fuerza?
Según las leyes de Newton, la aceleración de un objeto está directamente relacionada con la fuerza total que actúa sobre él y con su masa. Esto significa:
- Si aplicas una fuerza mayor a un objeto, este acelerará más.
- Si un objeto tiene más masa, necesitarás una fuerza mayor para que acelere la misma cantidad.
La relación se puede expresar con una fórmula sencilla:
Error al representar (Falta el ejecutable <code>texvc</code>. Véase math/README para configurarlo.): \mathbf{a} = \cfrac{\mathbf{F}}{m}
Donde a es la aceleración, F es la fuerza total que actúa sobre el objeto y m es la masa del objeto.
Ejemplos Comunes de Aceleración
- Aceleración de la gravedad: En la Tierra, la aceleración de la gravedad es de aproximadamente 9,8 m/s². Esto significa que si dejas caer un objeto, su velocidad aumenta en 9,8 metros por segundo cada segundo (si no consideramos la resistencia aerodinámica del aire). Por eso, los objetos caen cada vez más rápido.
- Frenado de un vehículo: Cuando un vehículo frena, está experimentando una aceleración en sentido contrario a su movimiento, lo que hace que su velocidad disminuya. A esto se le llama a menudo "desaceleración". Si el vehículo aumenta su velocidad, es una aceleración positiva.
Tipos de Aceleración: Media e Instantánea
La aceleración puede ser de dos tipos principales, dependiendo de cómo la midamos:
¿Qué es la Aceleración Media?
La aceleración media se calcula cuando queremos saber cuánto ha cambiado la velocidad de un objeto en un período de tiempo. Es como un promedio del cambio de velocidad. Para calcularla, dividimos el cambio total de velocidad entre el tiempo que tardó en ocurrir ese cambio.
Error al representar (Falta el ejecutable <code>texvc</code>. Véase math/README para configurarlo.): \langle\mathbf a\rangle = \mathbf{\bar{a}}= \frac{\Delta \mathbf v}{\Delta t}
Donde Δv es el cambio en la velocidad y Δt es el cambio en el tiempo.
¿Qué es la Aceleración Instantánea?
La aceleración instantánea es la aceleración de un objeto en un momento exacto. Es como si pudieras "congelar" el tiempo y medir la aceleración en ese instante preciso. Para calcularla, se usan herramientas matemáticas más avanzadas, como las derivadas.

Componentes de la Aceleración: Tangencial y Normal
Cuando un objeto se mueve, su aceleración puede tener dos partes o "componentes" principales, especialmente si su trayectoria es curva:
Aceleración Tangencial
La aceleración tangencial es la parte de la aceleración que cambia la rapidez del objeto. Si el objeto va más rápido o más lento, es debido a esta componente. Se dirige en la misma dirección del movimiento (o en la dirección opuesta si está frenando).
Error al representar (Falta el ejecutable <code>texvc</code>. Véase math/README para configurarlo.): a_t = \frac{dv}{dt}
Aceleración Normal o Centrípeta
La aceleración normal (también llamada centrípeta) es la parte de la aceleración que cambia la dirección del objeto. Si un objeto se mueve en una curva, esta aceleración lo "jala" hacia el centro de la curva, haciendo que su trayectoria se doble. Incluso si la rapidez del objeto es constante, si está girando, siempre habrá aceleración normal.
Error al representar (Falta el ejecutable <code>texvc</code>. Véase math/README para configurarlo.): a_n=\frac{v^2}{\rho}
Donde v es la velocidad y ρ (rho) es el radio de la curva.


- Si un objeto se mueve en un círculo a velocidad constante, la aceleración tangencial es cero, pero la aceleración normal es constante y se llama "aceleración centrípeta". Esta aceleración solo cambia la dirección, no la rapidez.
- Si un objeto se mueve en línea recta, la aceleración normal es cero, porque no hay cambio de dirección. Solo habrá aceleración tangencial si la rapidez cambia.
Medición de la Aceleración
La aceleración se puede medir con dispositivos llamados acelerómetros. Estos aparatos electrónicos pueden medir la aceleración en una, dos o tres direcciones. Funcionan con elementos que cambian su conductividad según la aceleración que experimentan.
Unidades de Aceleración
La unidad principal de aceleración en el Sistema Internacional es el metro por segundo al cuadrado (m/s²). También se usa el Sistema Cegesimal, donde la unidad es el centímetro por segundo al cuadrado (cm/s²), también conocido como Gal.
| м/s² | pie/s² | g | см/s² | |
|---|---|---|---|---|
| 1 м/s² = | 1 | 3,28084 | 0,101972 | 100 |
| 1 Pie/s² = | 0,304800 | 1 | 0,0310810 | 30,4800 |
| g = | 9,80665 | 32,1740 | 1 | 980,665 |
| 1 см/s² = | 0,01 | 0,0328084 | 0,00101972 | 1 |
Ejemplos de Valores de Aceleración
Aquí tienes algunos ejemplos de aceleraciones en diferentes situaciones:
| Tipo de movimiento | Aceleración, m/s² |
| 0,0060 | |
| Aceleración de la Luna orbitando la Tierra | 0,0027 |
| Ascensor de pasajeros | 0,9-1,6 |
| Tren metro | 1 |
| Corredor de corta distancia | 1,5 |
| Motocicleta | 3-6 |
| Frenado de emergencia de un coche | 4-6 |
| Usain Bolt, aceleración máxima | 8 |
| Automóvil de carreras | 8-9 |
| Frenado al abrir el paracaídas | 30 (3 g) |
| Lanzamiento y frenado de Nave espacial | 40-60 (4-6 g) |
| Maniobra de avión de reacción | hasta 100 (hasta 10 g) |
| Pistón de un motor de combustión interna | 3×10³ |
| Bala en el cañón de un rifle | 2,5×105 |
| Micropartículas en acelerador | (2-50)×1014 |
Nota: aquí g ≈ 10 m/s² (es el valor aproximado de la aceleración de la gravedad).
Importancia de la Aceleración en la Ingeniería
La aceleración es muy importante en el diseño de máquinas y sistemas que se mueven. Los ingenieros mecánicos necesitan calcular las aceleraciones para asegurarse de que las piezas de una máquina sean lo suficientemente fuertes y para determinar cuánta energía se necesita para que funcione.
Por ejemplo, en una fábrica de automóviles, los robots se mueven muy rápido para ensamblar los coches. Si los robots aceleran y frenan bruscamente muchas veces, consumen mucha energía. Los ingenieros usan programas de computadora para simular movimientos que permitan a los robots hacer su trabajo con menos aceleraciones y frenados, lo que ahorra energía.
Al diseñar algo que se mueve, los ingenieros deben:
- Elegir cómo se guiará el movimiento (por ejemplo, en línea recta, en círculo o con una trayectoria más compleja).
- Decidir qué tipo de motor o sistema usará para crear el movimiento.
- Calcular las aceleraciones necesarias para que el objeto se mueva como se espera, pero sin dañar las piezas ni gastar demasiada energía.
- Basándose en esos cálculos, seleccionar los materiales y el tamaño de las piezas para que el sistema sea seguro y eficiente.
Galería de imágenes
-
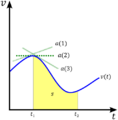
Gráfico que muestra cómo cambia la velocidad v a lo largo del tiempo t. La inclinación de la línea en cada punto nos dice la aceleración en ese momento.
-
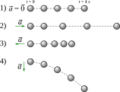
Ilustraciones del concepto de aceleración:
-

Cinemática del movimiento circular.
-
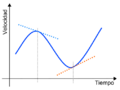
En el Movimiento Rectilíneo Acelerado, la aceleración instantánea se ve como la pendiente de la línea tangente en el gráfico de velocidad vs. tiempo.




Véase también
 En inglés: Acceleration Facts for Kids
En inglés: Acceleration Facts for Kids
