
Par cinemático para niños
En ingeniería mecánica, un par cinemático es la unión entre dos partes de una máquina o mecanismo. Imagina dos piezas de metal unidas por un perno; este perno permite que las piezas giren una alrededor de la otra, como una bisagra. Esa unión es un par cinemático.
Los pares cinemáticos son muy importantes porque definen cómo se moverán las piezas de un mecanismo. El ingeniero alemán Franz Reuleaux fue quien definió este concepto, ayudando a entender mejor cómo funcionan las máquinas.
Contenido
Tipos de uniones en mecanismos
Las uniones se clasifican según el tipo de movimiento que permiten.
Uniones en dos dimensiones
Para mecanismos que se mueven en un plano (como un dibujo en una hoja), algunos ejemplos son:
- La articulación: Permite que las piezas giren una respecto a la otra, como una bisagra en una puerta. Impide que se separen o se muevan de lado, pero sí que giren.
- La guía corredera: Permite que una pieza se deslice en una sola dirección, como un cajón que se abre y cierra. Impide el giro y el movimiento en otras direcciones.
Uniones en tres dimensiones
Para mecanismos que se mueven en el espacio, tenemos más tipos de uniones:
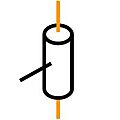
- La articulación cilíndrica: Permite que una pieza gire alrededor de un eje, como un eje que gira dentro de un agujero. Solo permite un tipo de movimiento.
- La rótula esférica: Permite que una pieza gire en cualquier dirección, como la articulación del hombro o una bola en un enchufe. Impide que las piezas se separen, pero permite muchos giros.
- La guía deslizante cilíndrica: Permite que una pieza se deslice y gire alrededor de un eje al mismo tiempo.
- La guía deslizante no cilíndrica: Permite que una pieza se deslice en una dirección, pero no que gire alrededor de ese eje.
- La soldadura: Une dos piezas de forma permanente, como si fueran una sola. No permite ningún movimiento entre ellas.
Apoyos y rodamientos
Un apoyo es una conexión articulada donde una de las piezas está fija a la estructura de la máquina o al suelo. Piensa en el eje de una rueda de bicicleta que está fijo al cuadro.
A diferencia de una articulación que es parte de un mecanismo complejo, un apoyo se enfoca en cómo se conecta una pieza que se mueve con una que está quieta. Los semiejes que giran o las piezas que se deslizan en línea recta (rodamientos lineales) son ejemplos de apoyos.
En lugar de apoyos simples, a menudo se usan rodamientos de rodillos. Estos tienen pequeñas bolas o rodillos entre las piezas para reducir la fricción y facilitar el movimiento.
Elementos de máquinas especiales
Junta universal o cardán


La junta universal o cardán es como dos articulaciones giratorias unidas. Permite que dos ejes que no están alineados puedan transmitir movimiento, incluso si cambian de ángulo. Por ejemplo, se usa en los coches para conectar el motor a las ruedas. Tiene dos tipos de movimiento de giro.
Juntas de velocidad constante
Estas juntas, como la junta universal, también se usan para transmitir movimiento entre ejes que pueden cambiar de ángulo. La diferencia es que las juntas de velocidad constante transmiten el movimiento de forma más suave y sin cambios de velocidad, lo que es importante en vehículos.
Uniones elásticas en ingeniería mecánica
Las uniones elásticas no son como las uniones normales donde las piezas se deslizan o ruedan. En estas, una parte de la unión se dobla o tuerce de forma elástica, como un resorte.
Estas uniones tienen la ventaja de no tener fricción, no necesitar mantenimiento y no tener holgura (espacio extra entre las piezas). Se usan en instrumentos de medición donde se necesita mucha precisión. Si la unión elástica es una parte debilitada del propio componente, se llama junta de flexión.
Uniones de dirección
Conexión deslizante
La conexión deslizante permite que una pieza se mueva solo en una dirección recta, como un cajón. Para que funcione, debe haber al menos dos superficies paralelas que guíen el movimiento.
Por ejemplo, los cajones de una cómoda usan este tipo de conexión. La vía del ferrocarril también es un ejemplo, aunque en este caso la conexión es solo en sentido vertical.


La distancia que puede deslizarse una pieza está limitada por el tamaño de las piezas.
Conexión plana
La conexión plana permite que una pieza se mueva sobre una superficie plana. Imagina un objeto que se desliza sobre una mesa. Permite dos movimientos de deslizamiento y un giro en ese plano.
Se logra cuando dos superficies planas se tocan. Un ejemplo es un taburete de tres patas sobre el suelo; siempre estará estable porque sus tres patas forman un plano.

Conexiones de ejes
Unión pivotante
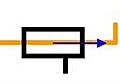
La unión pivotante es muy común. Permite que una pieza gire alrededor de un eje fijo, como una puerta que gira sobre sus bisagras. La posición de este eje es muy importante.

Esta unión se puede hacer con un cilindro que gira dentro de un agujero, y un tope que impide que se salga.
Unión pivotante deslizante o cilindro/cilindro
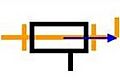
La unión pivotante deslizante permite que una pieza gire y se deslice a lo largo de un eje al mismo tiempo. Piensa en los jugadores de un futbolín que pueden girar y moverse de lado a lado.

La rotación puede ser ilimitada, pero el deslizamiento está limitado por el tamaño de las piezas. Esta unión es muy común en mecanismos, como la conexión entre el pistón y la biela en un motor.
Conexión helicoidal
La conexión helicoidal es la que se da entre un tornillo y su tuerca. Cuando giras el tornillo, este se mueve hacia adelante o hacia atrás. Es un movimiento combinado de giro y deslizamiento.

Lo que la caracteriza es el "paso de tornillo", que es la distancia que avanza el tornillo en una vuelta completa. Se usa para transformar un movimiento de giro en un movimiento lineal, como en un gato para levantar coches.
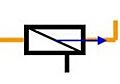
Conexión cilindro/plano
Esta conexión se da cuando un cilindro o una línea recta se apoya sobre una superficie plana. Permite que la pieza se deslice sobre el plano y gire alrededor de un eje perpendicular a ese plano.
Un ejemplo es un rodillo que se mueve sobre una superficie plana. También se ve en los engranajes rectos, donde los dientes se tocan a lo largo de una línea.
Galería de imágenes
-

Algunos tipos de uniones entre piezas
-
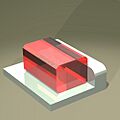
La solución más obvia pero no por ello menos hiperestática.
-
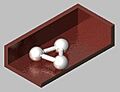
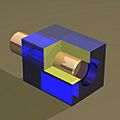
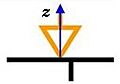
5 puntos = deslizamiento
-
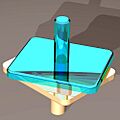
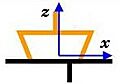
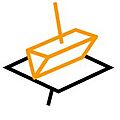
Dos caras planas en apoyo.
-
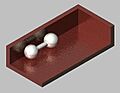
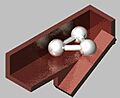
Ejemplos de soportes planos
-
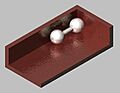
3 puntos = soporte plano
-
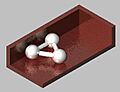
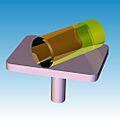
Conexión pivote por cilindro y plano radial (solución hiperestática y unilateral)
-
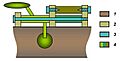
Soluciones constructivas bilaterales para unir llaves de un instrumento musical
-
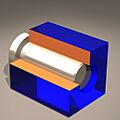
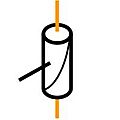
5 puntos = pivote
-
Solución para un pivote deslizante.
-
4 puntos = pivote deslizante
-

Un tornillo y varias tuercas
-

La tuerca y el husillo de bolas son, para el helicoidal, el equivalente del rodamiento.
-
5 puntos = helicoidal
-
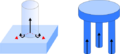
Conexión lineal rectilínea por cilindro colocado en un plano
-

2 puntos = rectilínea
-
En un engranaje recto, el enlace entre dos ruedas puede modelizarse mediante un rectilíneo lineal si el espesor de los piñones no es despreciable.
-

Solución bilateral.
-
-

-
-

-
-

-
-

-

-
-

-
-
-

-
-
-
-



































Véase también
 En inglés: Kinematic pair Facts for Kids
En inglés: Kinematic pair Facts for Kids
- Mecanismo
- Grados de libertad (ingeniería)
