
Traslación (geometría) para niños
Una traslación en geometría es un tipo de movimiento que desplaza una figura o un objeto de un lugar a otro sin cambiar su forma, tamaño ni su posición. Imagina que deslizas un objeto sobre una superficie plana: eso es una traslación. Cada punto de la figura se mueve la misma distancia y en la misma dirección.
Este movimiento se puede describir con un vector, que es como una flecha que indica la dirección y la distancia del desplazamiento. Por ejemplo, si tienes un triángulo y lo trasladas, cada esquina del triángulo se moverá exactamente la misma cantidad y en la misma dirección.


Contenido
¿Qué es una traslación en geometría?
Una traslación es un movimiento en el que una figura se "desliza" de un lugar a otro. Es como mover un mueble en una habitación sin girarlo ni cambiar su tamaño. La figura original y la figura trasladada son exactamente iguales.
Características principales de una traslación
Cuando realizas una traslación, ocurren dos cosas importantes:
- La figura que se mueve es idéntica a la figura original. Esto significa que tiene la misma forma y el mismo tamaño.
- La figura trasladada mantiene la misma orientación que la figura original. No se gira ni se voltea.
Para entenderlo mejor, piensa en un barco que se mueve en línea recta sobre el agua. El barco no cambia de tamaño ni se gira mientras avanza; simplemente se desplaza de un punto a otro.
¿Cómo se representa una traslación?
En matemáticas, una traslación se representa usando un vector. Un vector es una herramienta que nos dice dos cosas:
- La dirección en la que se mueve la figura (por ejemplo, hacia arriba, hacia abajo, a la derecha, a la izquierda).
- La magnitud o distancia que se mueve la figura.
Si tienes un punto P en una figura y lo trasladas, obtendrás un nuevo punto P. La "flecha" que va de P a P es el vector de traslación. Todos los puntos de la figura se mueven con el mismo vector.
Traslación y otros movimientos
La traslación es un tipo de isometría. Una isometría es una transformación que conserva las distancias entre los puntos. Esto significa que la forma y el tamaño de la figura no cambian. Otros tipos de isometrías son la rotación (girar una figura) y la reflexión (crear una imagen espejo de una figura).
Una traslación es un movimiento directo, lo que significa que no implica un giro o un volteo. Es un simple deslizamiento.
Galería de imágenes
-
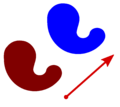
Una traslación desplaza cada punto de una figura o espacio la misma cantidad en una determinada dirección.
-
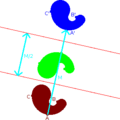
Una reflexión respecto un eje seguida de otra reflexión respecto a otro eje paralelo al primero es equivalente a una traslación.
Véase también
 En inglés: Translation (geometry) Facts for Kids
En inglés: Translation (geometry) Facts for Kids
