
Motor paso a paso para niños

Un motor paso a paso es un aparato eléctrico que convierte señales eléctricas en movimientos giratorios muy precisos. Imagina que es como un reloj que, en lugar de girar suavemente, avanza dando pequeños "pasos" o giros exactos. Cada paso es una cantidad específica de grados. Esto lo hace muy útil para tareas que necesitan mucha precisión.
Este tipo de motor es como un traductor de señales digitales a movimientos físicos. Puede ser controlado por computadoras o sistemas electrónicos, lo que le permite girar exactamente la cantidad de grados que se le indique.
Las principales ventajas de estos motores son su gran precisión y la capacidad de repetir movimientos una y otra vez sin errores. Por eso, se usan en muchos lugares, como en robots, drones, impresoras digitales, máquinas de automatización y equipos de preprensa.
Contenido
Tipos de motores paso a paso
Existen tres tipos principales de motores paso a paso, cada uno con características especiales:
Motor de reluctancia variable (VR)
Este motor tiene una parte que gira (llamada rotor) hecha de hierro con varias puntas, y una parte fija (llamada estátor) con bobinas de alambre. Gira cuando las bobinas del estátor se activan y atraen las puntas del rotor. Es muy rápido, pero no puede mover cargas muy pesadas. Cuando no está encendido, no tiene fuerza para mantenerse en su posición.
Motor de imán permanente
Este tipo de motor tiene un rotor con imanes. Esto le permite mantener una fuerza, incluso cuando no está encendido, lo que significa que puede quedarse en su posición. Dependiendo de cómo esté construido, puede dar pasos de diferentes tamaños, como 7.5, 11.25, 15, 18, 45 o 90 grados. El tamaño del paso depende de cuántos polos tenga el estátor.
Motor híbrido
El motor híbrido combina características de los dos tipos anteriores. Tiene muchas puntas tanto en el estátor como en el rotor, y el rotor también tiene un imán. Esta combinación le da mucha precisión y una gran fuerza. Puede dar pasos muy pequeños, de hasta 1.8 grados, lo que lo hace ideal para aplicaciones que requieren movimientos extremadamente finos.
Motores paso a paso unipolares
Estos motores suelen tener 5 o 6 cables. Son más fáciles de controlar porque solo necesitan que la corriente fluya en una dirección a través de sus bobinas. Tienen un cable común que se conecta a la fuente de energía, y los otros cables se conectan a tierra en un orden específico para que el motor dé cada paso. Si tiene 6 cables, cada par de bobinas tiene su propio cable común. Si tiene 5 cables, todas las bobinas comparten un solo cable común. Un motor unipolar de 6 cables también se puede usar como un motor bipolar si se dejan los cables comunes sin conectar.
Motores paso a paso bipolares
Estos motores suelen tener 4 cables. Son un poco más complejos de controlar porque necesitan que la dirección de la corriente cambie en sus bobinas para poder moverse. Esto significa que la corriente debe fluir en un sentido y luego en el sentido contrario en las bobinas para que el motor gire.
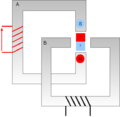
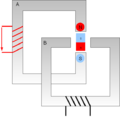
Cómo giran los motores bipolares
Para que un motor bipolar gire, se cambia la dirección del campo magnético que se crea en el estátor. El rotor, que tiene un imán permanente, intenta alinearse con este campo magnético cambiante. Al cambiar la dirección de la corriente en las bobinas, el campo magnético se mueve, y el rotor lo sigue, dando un paso.
| Paso | Bobina A (Dirección de corriente) |
Bobina B (Dirección de corriente) |
Imagen |
|---|---|---|---|
| Paso 1 | Hacia un lado | Apagada |  |
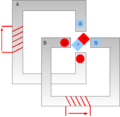
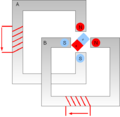
| (Semi-)Paso 2 | Hacia un lado | Hacia un lado |  |
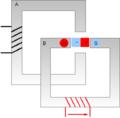
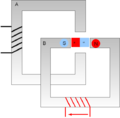
| Paso 3 | Apagada | Hacia un lado |  |
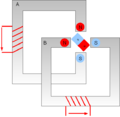
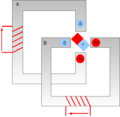
| (Semi-)Paso 4 | Hacia el otro lado | Hacia un lado |  |
| Paso 5 | Hacia el otro lado | Apagada |  |
| (Semi-)Paso 6 | Hacia el otro lado | Hacia el otro lado |  |
| Paso 7 | Apagada | Hacia el otro lado |  |
| (Semi-)Paso 8 | Hacia un lado | Hacia el otro lado |  |
Control de las bobinas


Para controlar un motor paso a paso bipolar, se usa un circuito especial llamado "Puente H". Este circuito permite cambiar la dirección de la corriente que fluye por las bobinas del motor. Al activar diferentes partes del "Puente H", la corriente puede ir en un sentido o en el otro, lo que hace que el motor gire en la dirección deseada.
Velocidad de rotación
La velocidad a la que gira un motor paso a paso depende de la frecuencia de los impulsos eléctricos que recibe y del número de polos que tiene el motor. Se puede calcular con esta fórmula:

Donde:
- f: es la frecuencia de los impulsos (cuántos impulsos por segundo recibe).
- n: es el número de polos que tiene el motor.
Es importante saber que estos motores tienen un límite de velocidad. Si los impulsos son demasiado rápidos (más de unos 625 veces por segundo), el motor puede no funcionar correctamente. Podría no moverse, solo vibrar, girar de forma extraña, girar al revés o perder fuerza. Por eso, es bueno probar los motores con un simulador o un circuito de prueba para asegurarse de que funcionan bien.
Véase también
 En inglés: Stepper motor Facts for Kids
En inglés: Stepper motor Facts for Kids
- Electromecánica
- Impresora
- Impresión 3D
Galería de imágenes
-
Paso 1
-
Semi-Paso 2
-
Paso 3
-
Semi-Paso 4
-
Paso 5
-
Semi-Paso 6
-
Paso 7
-
Semi-Paso 8
