
Torsión mecánica para niños
En ingeniería, la torsión es lo que ocurre cuando aplicamos una fuerza de giro a un objeto largo, como un eje o una viga. Imagina que intentas retorcer una toalla mojada: eso es torsión. Esta fuerza hace que el objeto se tuerza alrededor de su eje central.
Cuando un objeto sufre torsión, pasan dos cosas principales:
- Se generan fuerzas internas que intentan resistir el giro. Estas fuerzas se llaman tensiones tangenciales y actúan paralelas a la superficie del objeto.
- Si el objeto no es perfectamente redondo, su forma transversal puede deformarse o "alabearse". Esto significa que las secciones que antes eran planas, se curvan un poco.
El estudio de la torsión puede ser complicado, especialmente cuando el objeto se alabea. Sin embargo, los ingenieros usan diferentes teorías para entender cómo se comportan los materiales bajo torsión, dependiendo de la forma del objeto y de qué tan fuerte sea la torsión.
Contenido
¿Qué es la Torsión en Ingeniería?
La torsión es un tipo de esfuerzo que se aplica a un objeto cuando se le somete a un momento de fuerza que tiende a girarlo sobre su propio eje. Piensa en cómo giras la tapa de una botella o cómo un destornillador gira un tornillo; en ambos casos, estás aplicando torsión.
¿Cómo afecta la torsión a los materiales?
Cuando un material se tuerce, sus partículas internas se mueven y se reacomodan. Esto genera fuerzas dentro del material que se oponen al giro. Estas fuerzas son importantes para los ingenieros, ya que les ayudan a diseñar estructuras y máquinas que puedan soportar estas torsiones sin romperse.
Torsión en objetos redondos: La teoría de Coulomb
Para objetos con forma circular, como los ejes de un motor o las barras redondas, la torsión es más sencilla de entender. La teoría de Coulomb explica que, en estos casos, las secciones transversales del objeto (si las cortaras) simplemente giran, pero no se deforman ni se alabean. Las fuerzas internas son más fuertes cuanto más lejos están del centro del objeto.


Torsión en objetos no redondos: El alabeo
Cuando un objeto no es redondo (por ejemplo, una viga cuadrada o una barra en forma de "I"), la torsión es más compleja. Además de girar, sus secciones transversales se deforman, es decir, se "alabean". Esto significa que las superficies que eran planas antes de la torsión, se curvan. Los ingenieros deben tener esto en cuenta para asegurarse de que el objeto no falle.
¿Por qué es importante estudiar la torsión?
Estudiar la torsión es fundamental en la ingeniería para diseñar todo tipo de estructuras y componentes. Por ejemplo, los ejes de los coches, las hélices de los barcos o los tornillos de una máquina están sometidos a torsión. Entender cómo los materiales reaccionan a estas fuerzas ayuda a crear productos más seguros y duraderos.
¿Cómo se mide la torsión?
La torsión se mide con una cantidad llamada "momento torsor" (o par de torsión). Cuanto mayor sea este momento, más fuerte será la fuerza de giro aplicada al objeto. Los ingenieros también calculan las "tensiones tangenciales" que aparecen dentro del material, que son las fuerzas internas que resisten el giro.
Tensión máxima en diferentes formas
La cantidad de tensión que soporta un objeto bajo torsión depende de su forma. Por ejemplo:
- Para una barra circular, la tensión máxima se calcula con una fórmula específica que incluye el radio de la barra y el momento torsor.
- Para objetos con formas como triángulos o cuadrados, las tensiones máximas se dan en puntos específicos de sus lados y se calculan con otras fórmulas.
Los ingenieros usan estas fórmulas para asegurarse de que los materiales que eligen sean lo suficientemente fuertes para soportar las fuerzas de torsión a las que estarán expuestos.
Galería de imágenes
-
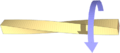
Barra de sección no circular sometida a torsión, al no ser la sección transversal circular necesariamente se produce alabeo seccional.
-
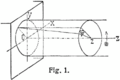
Viga circular bajo torsión


Véase también
 En inglés: Torsion (mechanics) Facts for Kids
En inglés: Torsion (mechanics) Facts for Kids
