
Curiosity para niños
Datos para niños Mars Science Laboratory (MSL) |
||
|---|---|---|
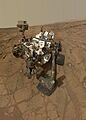
 Autorretrato de octubre de 2012 hecho por el Curiosity en Marte de sí mismo. La imagen es una serie de 55 fotografías de alta resolución posteriormente unidas
|
||
| Tipo de misión | Vehículo explorador tipo rover | |
| Operador | NASA | |
| Página web | [Sitio de la NASA para la misión MSL enlace] | |
| Duración de la misión | 1 año marciano (1,88 años terrestres; 686 días) | |
| Propiedades de la nave | ||
| Fabricante | Laboratorio de Propulsión a Reacción | |
| Masa de lanzamiento | 899 kg | |
| Potencia eléctrica | Generador termoeléctrico de radioisótopos (RTG) | |
| Comienzo de la misión | ||
| Lanzamiento | 26 de noviembre de 2011, 15:02:00 UT | |
| Vehículo | Atlas V 541 | |
| Lugar | Complejo de lanzamiento espacial 41 de Cabo Cañaveral | |
| Contratista | United Launch Alliance | |
| Desplegado desde | Cráter Gale, Marte | |
| Fecha de despliegue | 6 de agosto de 2012, 20:12 EDT (7 de agosto de 2012, 02:12 CEST) | |
La Mars Science Laboratory (MSL), también conocida como Curiosity, es una importante misión espacial de la NASA. Su objetivo principal es explorar el planeta Marte usando un vehículo robótico llamado rover.
El Curiosity fue lanzado el 26 de noviembre de 2011 y aterrizó con éxito en el cráter Gale de Marte el 6 de agosto de 2012. Desde entonces, ha estado enviando imágenes y datos valiosos a la Tierra.
Este rover es mucho más grande y pesado que los vehículos enviados en misiones anteriores a Marte. Lleva instrumentos científicos muy avanzados, algunos de ellos creados por equipos de diferentes países. La misión estaba planeada para durar un año marciano (casi dos años terrestres), pero el Curiosity sigue funcionando y explorando Marte hasta el día de hoy. Su objetivo es investigar si Marte pudo haber tenido vida en el pasado o si podría tenerla en el futuro.
Contenido
- ¿Cómo se desarrolló la misión Curiosity?
- ¿Cuáles son los objetivos del Curiosity en Marte?
- ¿Qué tan grande y rápido es el Curiosity?
- ¿Cómo obtiene energía el Curiosity?
- ¿Qué instrumentos lleva el Curiosity?
- El brazo robótico del Curiosity
- ¿Cómo aterrizó el Curiosity en Marte?
- ¿Dónde aterrizó el Curiosity?
- ¿De dónde viene el nombre "Curiosity"?
- Galería de imágenes
- Véase también
¿Cómo se desarrolló la misión Curiosity?
En septiembre de 2006, la NASA aprobó el lanzamiento del Curiosity. Ingenieros del Laboratorio de Propulsión a Chorro (JPL) diseñaron el rover, pensando que su diseño sería un modelo para futuras misiones.
Aunque hubo algunos desafíos económicos, el desarrollo de la misión continuó. Finalmente, el Curiosity fue lanzado en 2011 y aterrizó en Marte en 2012. El costo total de la misión fue de 2600 millones de dólares. El rover es controlado desde la Tierra y puede moverse a una velocidad de hasta 130 metros por hora.
¿Cuáles son los objetivos del Curiosity en Marte?
La misión MSL tiene cuatro grandes objetivos para entender mejor Marte:
- Determinar si alguna vez hubo vida en Marte.
- Conocer cómo es el clima de Marte.
- Estudiar la geología (las rocas y el suelo) del planeta.
- Preparar el camino para futuras exploraciones humanas en Marte.
Para lograr estos objetivos, el Curiosity realiza varias tareas importantes:
- 1. Buscar componentes orgánicos: Identificar y clasificar los elementos básicos de la vida, como el carbono.
- 2. Inventariar elementos clave: Contar los principales componentes necesarios para la vida, como carbono, hidrógeno, nitrógeno, oxígeno, fósforo y azufre.
- 3. Identificar señales de vida: Buscar características que muestren efectos de procesos biológicos.
- 4. Investigar la composición: Analizar la química y los minerales de la superficie marciana.
- 5. Entender la formación de rocas: Interpretar cómo se formaron y cambiaron las rocas y el suelo.
- 6. Evaluar la atmósfera: Estudiar cómo ha evolucionado la atmósfera de Marte a lo largo del tiempo.
- 7. Determinar el agua y el dióxido de carbono: Conocer la cantidad y distribución actual de agua y dióxido de carbono en Marte.
- 8. Caracterizar la radiación: Medir la radiación que llega a la superficie de Marte para proteger a futuros exploradores humanos.

¿Qué tan grande y rápido es el Curiosity?
El Curiosity pesa 899 kilogramos, incluyendo 80 kilogramos de instrumentos científicos. Es mucho más grande que los rovers anteriores, que pesaban 185 kg. Mide 2,7 metros de largo y puede superar obstáculos de hasta 75 centímetros de altura.
Su velocidad máxima es de 90 metros por hora, pero en promedio se mueve a unos 30 metros por hora, dependiendo del terreno. Se espera que el Curiosity recorra al menos 19 kilómetros durante su misión.
¿Cómo obtiene energía el Curiosity?

El Curiosity usa un generador termoeléctrico de radioisótopos (RTG) para obtener energía. Este generador convierte el calor de un material especial (plutonio-238) en electricidad. Produce 2,5 kilovatios-hora de energía al día.
Aunque la misión estaba planeada para dos años, el RTG puede funcionar por al menos catorce años. Este sistema es mucho más potente que los paneles solares usados en misiones anteriores. La electricidad del RTG carga dos baterías recargables que ayudan al rover a tener energía extra cuando la necesita.
¿Qué instrumentos lleva el Curiosity?
El Curiosity lleva 12 instrumentos principales para su misión:
Cámaras para ver Marte
Todas las cámaras fueron desarrolladas por Malin Space Science Systems y comparten un diseño similar.
- MastCam: Toma imágenes en color y en 3D de alta definición (1280x720 píxeles) a 10 cuadros por segundo. Puede ver en diferentes tipos de luz.
- Mars Hand Lens Imager (MAHLI): Montada en un brazo robótico, toma fotos microscópicas de rocas y suelo. Puede capturar imágenes en color de 1600x1200 píxeles con gran detalle. Tiene luces LED para ver en la oscuridad.
- Mars Descent Imager (MARDI): Toma fotos en color durante el descenso del rover a Marte, desde 3,7 kilómetros hasta 5 metros de altura. Ayuda a crear mapas del lugar de aterrizaje.
- Hazard Avoidance Cameras (Hazcams): Son cuatro pares de cámaras en blanco y negro ubicadas en la parte delantera y trasera del rover. Ayudan al Curiosity a evitar obstáculos y a colocar su brazo robótico de forma segura. Tienen un amplio campo de visión de 120 grados.
- Navigation Cameras (Navcams): Son dos pares de cámaras en blanco y negro en el mástil del rover. Se usan para la navegación y para crear imágenes en 3D del terreno. Tienen un campo de visión de 45 grados.
Espectrómetros para analizar materiales
- ChemCam: Usa un láser para vaporizar una pequeña parte de una roca a distancia y analiza la luz que emite para saber de qué está hecha.
- Espectrómetro de rayos X por radiación alfa (APXS): Este instrumento irradia muestras con partículas alfa y analiza los rayos X que se reemiten para determinar la composición de los elementos.
- CheMin: Analiza la estructura de los minerales en las muestras usando rayos X.
- Análisis de muestras en Marte (SAM): Busca compuestos orgánicos en muestras sólidas y gaseosas. Puede calentar las muestras hasta 1000°C para analizarlas.
Detectores de radiación
- Detector de evaluación de radiación (RAD): Mide la radiación espacial y solar en la superficie de Marte. Esto es importante para diseñar protección para futuros astronautas.

- Albedo dinámico de neutrones (DAN): Usa neutrones para medir la cantidad de hidrógeno o agua debajo de la superficie de Marte.
_-_Flickr_-_NASA_Goddard_Photo_and_Video.jpg)
Sensores ambientales
- Estación de supervisión ambiental rover (REMS): Es una estación meteorológica que mide la presión, humedad, dirección y fuerza del viento, temperatura y niveles de radiación ultravioleta.
- Mars Science Laboratory Entry Descent and Landing Instrument (MEDLI): Mide la densidad de la atmósfera exterior y la temperatura del escudo térmico de la sonda durante su entrada a Marte. Estos datos ayudan a mejorar el diseño de futuras misiones.
El brazo robótico del Curiosity


El Curiosity tiene un brazo robótico de 2,1 metros de largo con cinco herramientas en su extremo. Este brazo puede girar y extenderse para alcanzar diferentes puntos. Pesa 30 kg y fue diseñado para ser muy preciso.
Dos de las herramientas son el espectrómetro de rayos X (APXS) y la cámara MAHLI, que se usan para analizar de cerca las rocas y el suelo. Las otras tres herramientas son para recoger y preparar muestras: un taladro, un cepillo y mecanismos para tamizar y enviar el polvo de las muestras a los analizadores SAM y CheMin dentro del rover. El taladro puede hacer agujeros de 1,6 cm de diámetro y hasta 5 cm de profundidad.
A principios de 2015, el taladro tuvo un problema eléctrico, y en 2016, un motor dentro del taladro causó un mal funcionamiento. Aunque el rover puede seguir moviéndose y usando su brazo, la perforación de rocas estuvo suspendida por un tiempo mientras los ingenieros investigaban y reparaban el problema.
¿Cómo aterrizó el Curiosity en Marte?

Para aterrizar en Marte, se usó una técnica especial de guiado atmosférico, similar a la que usó el Apolo 11 para llegar a la Luna. La nave entró en la atmósfera de Marte y usó pequeños cohetes para ajustar su trayectoria. Esto permitió controlar la dirección y reducir la zona de aterrizaje.
La última parte del descenso fue muy innovadora. A 1800 metros de altura, a una velocidad de 300 kilómetros por hora, el rover se separó de su paracaídas. Luego, una "grúa espacial" llamada Skycrane (grúa aérea) con retrocohetes se encendió. A 23 metros del suelo, esta grúa bajó el Curiosity con cables, permitiendo que aterrizara suavemente con sus ruedas ya listas para moverse. Esta técnica fue elegida porque otras opciones, como las bolsas de aire o las patas de aterrizaje, no eran adecuadas para el tamaño y peso del Curiosity o para el terreno marciano.
¿Dónde aterrizó el Curiosity?
Después de analizar varios lugares, el cráter Gale fue el sitio elegido para el aterrizaje del Curiosity. Este cráter se encuentra en las coordenadas 4,6° S, 137,2° E.
¿De dónde viene el nombre "Curiosity"?
El nombre Curiosity (que significa "curiosidad" en español) fue elegido por la NASA a través de un concurso nacional para estudiantes. Más de 9.000 propuestas fueron enviadas. La ganadora fue Clara Ma, una estudiante de 12 años de Kansas.
Como premio, Clara visitó el Laboratorio de Propulsión a Chorro de la NASA en California y pudo firmar su nombre directamente en el rover mientras lo estaban construyendo. En su ensayo ganador, Clara escribió sobre cómo la curiosidad es una "llama eterna" que nos impulsa a explorar y a hacernos preguntas.
Galería de imágenes
-

Curiosity en "Rocknest" en
Aeolis Palus
(Octubre de 2012) -
Curiosity en
"John Klein" en
Aeolis Palus
(mayo de 2013) -

Curiosity en "Windjana" en
Aeolis Palus
(mayo de 2014) -

Curiosity en
"Mojave" en
Aeolis Mons
(enero de 2015) -

Curiosity en
"Buckskin" en
Aeolis Mons
(Agosto de 2015) -

Curiosity en
"Big Sky" en Aeolis Mons
(Octubre de 2015) -

Curiosityen
"Namib" en
Aeolis Mons
(enero de 2016) -

Curiosity en
"MurrayB" en
Aeolis Mons
(Septiembre de 2016) -

Curiosity primera imagen panorámica a 360 ° en color (8 de agosto de 2012)
-

Vista de Curiosity del Monte Sharp (20 de septiembre de 2012; versión en color crudo )
-

Vista del "Curiosity" del área Rocknest. Monte Sharp domina el horizonte, mientras que Glenelg está a la izquierda del centro y las pistas de rover están a la derecha del centro (16 de noviembre de 2012); versión en color sin procesar; panorámica en alta resolución).
-

Vista de Curiosity de Rocknest mirando al este hacia el lago Point (centro) en el camino hacia Glenelg (26 de noviembre de 2012); ; versión de color sin procesar)
-

Vista de Curiosity "Monte Sharp" (9 de septiembre de 2015)
-

Curiosity vista de suelo marciano al atardecer.







Véase también
 En inglés: Curiosity (rover) Facts for Kids
En inglés: Curiosity (rover) Facts for Kids
- Bradbury Landing
- Gale (cráter)
- InSight
- Mars Exploration Rovers
- Anexo:Misiones espaciales
