
Coordenadas esféricas para niños
El sistema de coordenadas esféricas es una forma de ubicar puntos en el espacio tridimensional. Imagina que estás en el centro de una esfera. Para saber dónde está un punto en esa esfera o fuera de ella, necesitas tres datos:
- La distancia desde el centro hasta el punto, que llamamos r (radio).
- El ángulo que forma la línea desde el centro al punto con el eje vertical (como el Polo Norte), que llamamos θ (theta). Este ángulo se mide desde 0° (arriba) hasta 180° (abajo).
- El ángulo que forma la proyección del punto en el suelo (el plano XY) con el eje horizontal (como el este), que llamamos φ (phi). Este ángulo se mide alrededor del centro, de 0° a 360°.
Este sistema es muy útil para describir cosas que tienen forma de esfera, como la Tierra o los planetas, o para entender cómo se propagan las ondas de sonido o luz desde un punto.

Contenido
¿Cómo se usan las coordenadas esféricas?
Las coordenadas esféricas nos permiten describir la posición de cualquier objeto en el espacio usando una distancia y dos ángulos. Es como dar unas instrucciones muy precisas para encontrar algo.
¿Qué significan los ángulos y la distancia?
- r (radio): Es la distancia desde el origen (el centro del sistema de coordenadas) hasta el punto que queremos ubicar. Siempre es un valor positivo o cero.
- θ (theta): Se llama colatitud o ángulo polar. Mide la inclinación del punto respecto al eje vertical (eje Z). Va desde 0 grados (directamente hacia arriba) hasta 180 grados (directamente hacia abajo).
- φ (phi): Se llama ángulo azimutal. Mide la rotación del punto alrededor del eje vertical. Se mide en el plano horizontal (XY) desde el eje X positivo, y va desde 0 grados hasta 360 grados.
¿Hay diferentes formas de medir los ángulos?
Sí, a veces los científicos y matemáticos usan convenciones ligeramente diferentes para los ángulos.
- En muchos lugares, como Europa, se usa φ para el ángulo azimutal (0° a 360°) y θ para la colatitud (0° a 180°). Esta es la forma más común.
- En otros lugares, como Estados Unidos, a veces se intercambian los símbolos, usando θ para el azimutal y φ para la colatitud o latitud.
Es importante saber qué convención se está usando para no confundirse al leer mapas o planos.

¿Cómo se relacionan con otras coordenadas?
Las coordenadas esféricas se pueden transformar en otros sistemas de coordenadas, como las cartesianas o las cilíndricas. Esto es útil porque cada sistema es mejor para diferentes tipos de problemas.
Coordenadas esféricas y cartesianas
Las coordenadas cartesianas son las que usas normalmente: (x, y, z). Para pasar de esféricas a cartesianas, se usan estas fórmulas:
- x = r * seno(θ) * coseno(φ)
- y = r * seno(θ) * seno(φ)
- z = r * coseno(θ)
Y para pasar de cartesianas a esféricas, las fórmulas son un poco más complejas, pero también existen.

Coordenadas esféricas y cilíndricas
Las coordenadas cilíndricas usan una distancia horizontal (ρ), un ángulo (φ) y una altura (z). Las relaciones entre esféricas y cilíndricas son:
- r = raíz cuadrada(ρ² + z²)
- θ = arcotangente(ρ / z)
- φ = φ (el ángulo azimutal es el mismo)
Y al revés:
- ρ = r * seno(θ)
- φ = φ
- z = r * coseno(θ)
¿Qué son las líneas y superficies coordenadas?
Imagina que tienes un punto en el espacio. Si solo cambias una de sus coordenadas (r, θ o φ) y mantienes las otras dos fijas, el punto se moverá a lo largo de una línea. Estas son las líneas coordenadas.
- Si cambias solo r, el punto se mueve en una línea recta que sale del centro.
- Si cambias solo θ, el punto se mueve en un semicírculo vertical (como un meridiano en la Tierra).
- Si cambias solo φ, el punto se mueve en un círculo horizontal (como un paralelo en la Tierra).
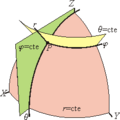
Si fijas una de las coordenadas, el punto se moverá sobre una superficie coordenada.
- Si fijas r (r = constante), el punto se mueve sobre una esfera.
- Si fijas θ (θ = constante), el punto se mueve sobre un cono.
- Si fijas φ (φ = constante), el punto se mueve sobre un semiplano vertical.
Estas líneas y superficies son muy importantes en física e ingeniería para resolver problemas de forma más sencilla.
Galería de imágenes
-
Líneas coordenadas esféricas

Véase también
 En inglés: Spherical coordinate system Facts for Kids
En inglés: Spherical coordinate system Facts for Kids
- Sistema de coordenadas
- Coordenadas geográficas
- Coordenadas cartesianas
- Coordenadas cilíndricas
